
लाल ग्रह की अनजान सतह पर एक नई ‘दिशा’ का उदय
अंतरिक्ष अन्वेषण (Space Exploration) के इतिहास में मनुष्य ने कई अभूतपूर्व उपलब्धियां हासिल की हैं—चांद पर कदम रखने से लेकर सूर्य के वायुमंडल को छूने तक। लेकिन जब बात मंगल ग्रह (Mars) की आती है, तो हमारी महत्वाकांक्षाएं एक अलग ही स्तर पर पहुंच जाती हैं। हम केवल वहां रोवर नहीं भेजना चाहते; हम वहां एक स्थायी मानव बस्ती (Human Settlement) बसाना चाहते हैं। इस महान लक्ष्य के रास्ते में अब तक की सबसे बड़ी तकनीकी बाधाओं में से एक थी—मंगल ग्रह पर सटीक नेविगेशन या ‘GPS’ का अभाव।
हाल ही में, अमेरिकी अंतरिक्ष एजेंसी NASA (नासा) ने मंगल ग्रह की कक्षा और सतह के बीच एक प्रायोगिक ‘लोकल पोजिशनिंग सिस्टम’ (GPS जैसी तकनीक) का सफल परीक्षण करके इस बाधा को पार करने की दिशा में एक ऐतिहासिक कदम उठाया है। अब तक हमारे रोवर मंगल की सतह पर “अंधेरे में टटोलने” जैसी स्थिति में चलते थे, जो पृथ्वी से मिलने वाले कमांड्स पर निर्भर थे। लेकिन इस नई सफलता ने लाल ग्रह पर स्व-चालित (Autonomous) नेविगेशन के एक नए युग की शुरुआत कर दी है।
एक तकनीकी और वैज्ञानिक विश्लेषक के रूप में, खगोल भौतिकी (Astrophysics), डीप स्पेस कम्युनिकेशन और सैटेलाइट नेविगेशन के डेटा का विश्लेषण करते हुए, मैं आपके सामने इस क्रांतिकारी परीक्षण का एक अत्यंत विस्तृत और 360-डिग्री ‘मेटा-विश्लेषण’ प्रस्तुत कर रहा हूँ। इस मेगा ब्लॉग में हम समझेंगे कि मंगल पर नेविगेशन इतना मुश्किल क्यों है, नासा की यह नई तकनीक कैसे काम करती है, इसके पीछे का गणित और भौतिकी क्या है, और यह भविष्य के अंतरिक्ष यात्रियों (Astronauts) के लिए कैसे एक ‘गेम-चेंजर’ साबित होगी।
1. वर्तमान समस्या: मंगल पर रास्ता खोजना इतना मुश्किल क्यों है?
पृथ्वी पर जब हम रास्ता भटक जाते हैं, तो अपना स्मार्टफोन निकालते हैं और Google Maps चालू कर लेते हैं। हमारे फोन का रिसीवर पृथ्वी की कक्षा में मौजूद 24 से अधिक GPS (Global Positioning System) सैटेलाइट्स के नेटवर्क से जुड़कर कुछ ही सेकंड में हमारी सटीक लोकेशन बता देता है। लेकिन मंगल पर ऐसा कोई नेटवर्क नहीं है।

वर्तमान में मार्स रोवर कैसे चलते हैं?
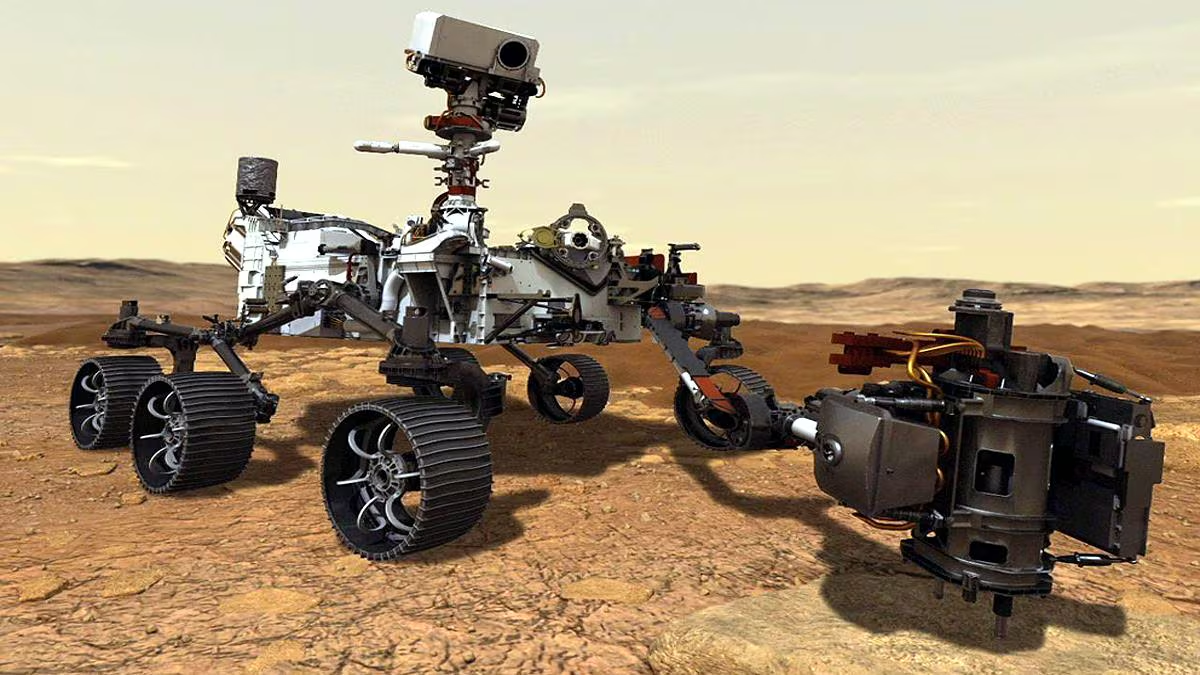
वर्तमान में ‘परसेवरेंस’ (Perseverance) और ‘क्यूरियोसिटी’ (Curiosity) जैसे रोवर नेविगेशन के लिए दो मुख्य तरीकों का उपयोग करते हैं:
- विजुअल ओडोमेट्री (Visual Odometry): रोवर अपने कैमरों से आसपास की चट्टानों और गड्ढों की तस्वीरें लेता है। जब वह थोड़ा आगे बढ़ता है, तो नई तस्वीरें लेता है और पुरानी तस्वीरों से तुलना करके अनुमान लगाता है कि वह कितना चला। यह प्रक्रिया बेहद धीमी और ऊर्जा की खपत करने वाली है।
- पृथ्वी पर निर्भरता (The Earth Lag): रोवर तस्वीरें पृथ्वी पर ‘डीप स्पेस नेटवर्क’ (DSN) के माध्यम से भेजता है। पृथ्वी पर बैठे वैज्ञानिक उन तस्वीरों का विश्लेषण करते हैं, एक सुरक्षित रास्ता तय करते हैं, और फिर रोवर को आगे बढ़ने का कमांड भेजते हैं।
दूरी और समय का गणित (The Speed of Light Delay):
पृथ्वी और मंगल के बीच की दूरी लगातार बदलती रहती है (लगभग 5.5 करोड़ किमी से लेकर 40 करोड़ किमी तक)। रेडियो तरंगे प्रकाश की गति ($c \approx 3 \times 10^8$ मीटर/सेकंड) से यात्रा करती हैं।
यदि हम समय ($t$) की गणना करें:
$$t = \frac{d}{c}$$
इस फॉर्मूले के अनुसार, पृथ्वी से मंगल तक एक सिग्नल पहुंचने में 3 से 22 मिनट तक का समय लग सकता है। यानी रोवर को एक कदम आगे बढ़ाने का कमांड देने और उसका कंफर्मेशन मिलने में 45 मिनट तक लग सकते हैं! यह ‘कम्युनिकेशन लैग’ (Communication Lag) मंगल पर तेजी से काम करने में सबसे बड़ी बाधा है।
2. नासा की नई तकनीक: ‘मंगल का GPS’ क्या है और यह कैसे काम करता है?
नासा ने जिस नई तकनीक का परीक्षण किया है, वह पृथ्वी के GPS का एक ‘लाइट’ (Lite) या मिनिएचर वर्ज़न है। पृथ्वी के GPS के लिए एक विशाल सैटेलाइट तारामंडल (Constellation) की आवश्यकता होती है, लेकिन मंगल पर इसे शुरुआत में वहां मौजूद मौजूदा ऑर्बिटर्स (Orbiters) और सतह पर मौजूद लैंडर्स/रोवर्स के बीच एक इंटरलॉकिंग नेटवर्क बनाकर हासिल किया जा रहा है।
तकनीक का आधार: ट्राइलेटरेशन (Trilateration)
GPS तकनीक जिस मूल गणितीय सिद्धांत पर काम करती है, उसे ट्राइलेटरेशन कहते हैं। इसे समझने के लिए:
- यदि आपको पता है कि आप सैटेलाइट A से 10 किमी दूर हैं, तो आप उस सैटेलाइट के चारों ओर 10 किमी त्रिज्या वाले एक काल्पनिक गोले (Sphere) की सतह पर कहीं भी हो सकते हैं।
- यदि आपको सैटेलाइट B से भी अपनी दूरी (मान लीजिए 15 किमी) पता है, तो आप वहां होंगे जहां ये दोनों गोले एक-दूसरे को काटते हैं (एक वृत्त के आकार में)।
- जब आप तीसरे सैटेलाइट C से अपनी दूरी जोड़ते हैं, तो वह वृत्त दो बिंदुओं में बदल जाता है।
- चौथा सैटेलाइट (या ग्रह की सतह का डेटा) उस सटीक एक बिंदु को निर्धारित कर देता है जहां आप खड़े हैं।

मंगल पर परीक्षण की प्रक्रिया:
हालिया परीक्षण में, नासा ने मंगल की कक्षा में चक्कर लगा रहे अपने ऑर्बिटर्स (जैसे Mars Reconnaissance Orbiter – MRO और MAVEN) और सतह पर मौजूद संपत्तियों (Assets) के बीच समय-सिग्नल (Time-stamped signals) का आदान-प्रदान किया। सिग्नल को एक डिवाइस से दूसरे डिवाइस तक पहुंचने में जो ‘माइक्रोसेकंड’ का समय लगा, उसकी गणना करके रोवर की सटीक स्थिति का पता लगाया गया—वह भी पृथ्वी की मदद के बिना!
3. ‘डीप स्पेस एटॉमिक क्लॉक’ (DSAC): इस सफलता का असली हीरो
इस पूरे ‘मार्स GPS’ प्रोजेक्ट की सफलता के पीछे एक बेहद खास और जटिल उपकरण का हाथ है, जिसे Deep Space Atomic Clock (DSAC) कहा जाता है।
सटीक समय का महत्व:
GPS के लिए समय की सटीकता सबसे महत्वपूर्ण है। रेडियो तरंगे 1 नैनोसेकंड (सेकंड का एक अरबवां हिस्सा) में लगभग 30 सेंटीमीटर (1 फुट) की दूरी तय करती हैं। यदि सैटेलाइट की घड़ी में 1 मिलीसेकंड (सेकंड का हजारवां हिस्सा) की भी गलती हो जाए, तो आपकी लोकेशन में 300 किलोमीटर का अंतर आ जाएगा!
- पृथ्वी के सैटेलाइट्स: पृथ्वी के GPS सैटेलाइट्स में परमाणु घड़ियां (Atomic Clocks) होती हैं, जो रेफ्रिजरेटर के आकार की और बहुत भारी होती हैं। उन्हें पृथ्वी से बार-बार सिंक्रोनाइज़ (Synchronize) किया जाता है।
- DSAC का चमत्कार: नासा की जेट प्रोपल्शन लेबोरेटरी (JPL) ने एक ऐसी परमाणु घड़ी विकसित की है जो टोस्टर के आकार की है, ऊर्जा कम खाती है, और इतनी सटीक है कि यह 90 लाख वर्षों में केवल 1 सेकंड पीछे होगी। इस घड़ी के मंगल के ऑर्बिटर्स में फिट होने से, अब उन्हें समय सुधारने के लिए पृथ्वी की ओर देखने की जरूरत नहीं है। वे स्वयं सिग्नल की दूरी और लोकेशन की गणना कर सकते हैं।
4. पृथ्वी का GPS बनाम मंगल का संभावित GPS (तुलनात्मक विश्लेषण)
मंगल पर एक पूर्ण नेविगेशन प्रणाली स्थापित करना पृथ्वी की तुलना में बहुत अलग होगा। नीचे दी गई तालिका इन दोनों प्रणालियों के बीच के तकनीकी और ढांचागत अंतर को स्पष्ट करती है:
| तकनीकी पैरामीटर (Parameter) | पृथ्वी का GPS (Earth GPS) | मंगल का नया नेविगेशन सिस्टम (Mars Nav System) |
| उपग्रहों की संख्या | 24 से 32 उपग्रहों का मजबूत नेटवर्क | शुरुआत में 3 से 5 ऑर्बिटर्स (जैसे MRO, TGO, MAVEN) का उपयोग |
| सिग्नल का प्रकार | एकतरफा (One-way): सैटेलाइट से रिसीवर तक | दो-तरफा (Two-way): ऑर्बिटर और रोवर के बीच पिंग-पोंग सिग्नल |
| सटीकता (Accuracy) | सेंटीमीटर से लेकर कुछ मीटर तक | वर्तमान परीक्षणों में 10 से 30 मीटर तक (भविष्य में सुधरेगी) |
| नियंत्रण केंद्र (Control Center) | पृथ्वी पर मौजूद विशाल कंट्रोल स्टेशन | ऑटोनॉमस (स्वचालित), डीप स्पेस एटॉमिक क्लॉक पर निर्भर |
| कवरेज (Coverage) | 24×7 ग्लोबल कवरेज | रुक-रुक कर (Intermittent), जब ऑर्बिटर रोवर के ऊपर से गुजरता है |
5. यह सफलता एक ‘गेम-चेंजर’ क्यों है? (The Massive Implications)
मंगल पर GPS जैसी तकनीक का सफल परीक्षण केवल एक अकादमिक उपलब्धि नहीं है; यह भविष्य के हर मंगल मिशन की रूपरेखा (Blueprint) को पूरी तरह से बदल देगा।
A. रोवर्स के लिए सुपर-फास्ट ऑटोनॉमस ड्राइविंग:
वर्तमान में ‘परसेवरेंस’ रोवर अपने सबसे अच्छे दिन में बमुश्किल 100 से 200 मीटर चल पाता है। लोकल पोजिशनिंग सिस्टम के लागू होने से, रोवर को पृथ्वी से कमांड का इंतजार नहीं करना पड़ेगा। वह अपने लक्ष्य के निर्देशांक (Coordinates) प्राप्त करेगा और दिन भर में कई किलोमीटर की यात्रा बिना रुके कर सकेगा। इससे वैज्ञानिक अनुसंधान की गति 10 गुना तक बढ़ जाएगी।
B. ड्रोन्स और हेलीकॉप्टर्स की उड़ान:
नासा के ‘इनजेनिटी’ (Ingenuity) हेलीकॉप्टर ने साबित कर दिया है कि मंगल के पतले वायुमंडल में उड़ान भरी जा सकती है। भविष्य के मिशनों में बड़े ड्रोन्स भेजे जाएंगे। ड्रोन्स को तेज गति से उड़ने और बाधाओं से बचने के लिए वास्तविक समय (Real-time) के GPS डेटा की आवश्यकता होती है। यह नई तकनीक मंगल पर ड्रोन्स के झुंड (Swarm of drones) को नेविगेट करने में मदद करेगी।

C. सुरक्षित और सटीक लैंडिंग (Precision Landing):
जब मंगल पर लैंडर उतरता है, तो वह ‘7 मिनट्स ऑफ टेरर’ (7 Minutes of Terror) से गुजरता है। अब तक लैंडिंग का इलाका कई किलोमीटर लंबा और चौड़ा (Landing Ellipse) होता था। लेकिन जब हम इंसानों को भेजेंगे, तो हमें उन्हें उनके पहले से भेजे गए हैबिटेट (रहने के स्थान) और सप्लाई मॉड्यूल से चंद मीटर की दूरी पर उतारना होगा। ऑर्बिटल नेविगेशन नेटवर्क एक अंतरिक्ष यान को सतह पर बिल्कुल ‘बुल्सआई’ (Bullseye) पर उतरने में मदद करेगा।
6. भविष्य का क्षितिज: ‘आर्टेमिस’ जनरेशन और मंगल पर मानव बस्तियां
नासा के वर्तमान ‘आर्टेमिस मिशन’ (Artemis Mission) का उद्देश्य चंद्रमा पर एक स्थायी बेस बनाना है, जो मंगल पर मानव मिशन के लिए एक ‘लॉन्चपैड’ का काम करेगा।
जब 2030 के दशक के अंत या 2040 के दशक में पहले इंसान मंगल ग्रह की लाल धूल पर कदम रखेंगे, तो उनका जीवित रहना पूरी तरह से इस नेविगेशन नेटवर्क पर निर्भर करेगा।
- भटके हुए अंतरिक्ष यात्री: कल्पना कीजिए कि एक अंतरिक्ष यात्री अपने बेस कैंप से कई किलोमीटर दूर रिसर्च करने गया है और मंगल पर अचानक भयानक धूल भरी आंधी (Dust Storm) आ जाती है, जिससे दृश्यता शून्य हो जाती है। ऐसे में पृथ्वी से मदद मांगना व्यर्थ होगा। एक ‘मार्स GPS’ डिवाइस ही उस अंतरिक्ष यात्री को सुरक्षित उसके हैबिटेट तक वापस ला सकेगा।
- संसाधनों की मैपिंग (Resource Mapping): पानी (बर्फ) या खनिजों की खदानों को मार्क करने और वहां तक रोबोटिक माइनिंग ट्रकों को स्वचालित रूप से भेजने के लिए इस नेविगेशन प्रणाली का उपयोग किया जाएगा।
7. मंगल पर एक स्थायी GPS नेटवर्क बनाने की चुनौतियां
यद्यपि हालिया परीक्षण एक शानदार सफलता है, लेकिन पूरे मंगल ग्रह को पृथ्वी की तरह एक निर्बाध (Seamless) नेविगेशन कवरेज देने में अभी भी कई बड़ी तकनीकी चुनौतियां मौजूद हैं:
- लागत और इंफ्रास्ट्रक्चर (Cost & Deployment): पृथ्वी के GPS को बनाने में अरबों डॉलर और दशकों लगे थे। मंगल पर 24 नेविगेशन सैटेलाइट्स का एक ‘मार्स-नेट’ (Mars-Net) स्थापित करने के लिए कई रॉकेट लॉन्च करने होंगे, जो कि आर्थिक रूप से एक बहुत बड़ा बोझ है।
- अंतरिक्ष विकिरण (Cosmic Radiation): मंगल का कोई चुंबकीय क्षेत्र (Magnetic field) नहीं है जो उसे सौर विकिरण से बचा सके। वहां पर मौजूद सैटेलाइट्स और उनकी नाजुक एटॉमिक घड़ियों को सूर्य के भयंकर रेडिएशन (Solar Flares) से बचाने के लिए ‘रेडिएशन-हार्डनिंग’ (Radiation hardening) की आवश्यकता होती है, जो उपकरणों को भारी और महंगा बनाता है।
- सिग्नल का क्षीण होना (Signal Degradation): मंगल के वायुमंडल में मौजूद भारी धूल और आयनमंडल (Ionosphere) में होने वाले बदलाव कभी-कभी रेडियो सिग्नल्स को बाधित कर सकते हैं, जिससे नेविगेशन में त्रुटियां (Errors) आ सकती हैं।
एक नए ‘इंटरप्लेनेटरी’ युग की शुरुआत
नासा द्वारा मंगल ग्रह पर नेविगेशन तकनीक का यह सफल परीक्षण साबित करता है कि मनुष्य तकनीकी नवाचार (Technological Innovation) की अपनी सीमाओं को लगातार आगे बढ़ा रहा है। जो ग्रह कल तक रात के आसमान में केवल एक लाल बिंदु था, आज हम वहां अपनी मशीनों को एक-दूसरे से बात करना और खुद अपना रास्ता खोजना सिखा रहे हैं।
यह ‘मार्स पोजिशनिंग सिस्टम’ केवल रोवर्स को रास्ता दिखाने के लिए नहीं है; यह उस भविष्य की आधारशिला है जहां मनुष्य एक ‘बहु-ग्रहीय प्रजाति’ (Multi-planetary species) बनेगा। जब आने वाली पीढ़ियां मंगल ग्रह की सतह पर अपने स्मार्ट-सूट का नेविगेशन स्क्रीन चालू करेंगी, तो उन्हें शायद यह याद भी न हो कि इसकी शुरुआत 2026 के इस ऐतिहासिक परीक्षण से हुई थी। विज्ञान इसी खामोशी के साथ भविष्य का निर्माण करता है।
भावेश Tez Khabri के सह-संस्थापक और प्रबंध संपादक हैं। अभिनय के क्षेत्र में अपनी पहचान बनाने के बाद, अब वे पत्रकारिता के माध्यम से समाज में पारदर्शिता लाने का प्रयास कर रहे हैं। भावेश जी मुख्य रूप से राजनीति, क्राइम और शिक्षा से जुड़ी खबरों का नेतृत्व करते हैं और सुनिश्चित करते हैं कि हर खबर पूरी तरह से सत्यापित (Verified) हो।